
Transiidiaja tööpõhimõte
Mõõtmise põhimõte:
Transiidiaja korrelatsiooni põhimõte kasutab ära asjaolu, et ultrahelisignaali lennuaega mõjutab kandekeskkonna voolukiirus.Nagu ujuja, kes liigub üle voolava jõe, liigub ultraheli signaal aeglasemalt ülesvoolu kui allavoolu.
MeieUltraheli voolumõõturid TF1100töötama vastavalt sellele üleminekuaja põhimõttele:
Vf = Kdt/TL
Kus:
VcFlow kiirus
K: Pidevalt
dt: erinevus lennuajas
TL: Keskmine transiidiaeg
Kui voolumõõtur töötab, edastavad ja võtavad kaks andurit vastu ultrahelisignaale, mida võimendatakse mitme kiirega, mis liigub esmalt allavoolu ja seejärel ülesvoolu.Kuna ultraheli levib allavoolu kiiremini kui ülesvoolu, on lennuaeg (dt) erinev.Kui vool on paigal, on ajavahe (dt) null.Seega, kuni me teame nii alla- kui ka ülesvoolu lennuaega, saame järgmise valemi abil välja arvutada ajavahe ja seejärel voolukiiruse (Vf).

V meetod
W meetod
Z meetod
Doppleri tööpõhimõte
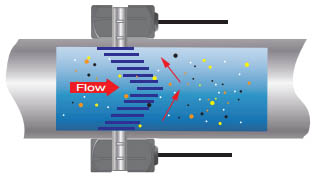
TheDF6100seeria vooluhulgamõõtur töötab, edastades ultraheli heli edastavast muundurist, heli peegelduvad kasulikud helireflektorid, mis on riputatud vedeliku sees ja salvestatud vastuvõtva anduri poolt.Kui helireflektorid liiguvad heli edastamise teel, peegelduvad helilained edastatavast sagedusest nihutatud sagedusega (Doppleri sagedus).Sageduse nihe on otseselt seotud liikuva osakese või mulli kiirusega.Seda sageduse nihet tõlgendab seade ja teisendab see erinevateks kasutaja määratud mõõtühikuteks.
Peavad olema mõned osakesed, mis on piisavalt suured, et tekitada pikisuunalist peegeldust – osakesed, mis on suuremad kui 100 mikronit.
Andurite paigaldamisel peab paigalduskohas olema piisavalt sirge toru pikkus üles- ja allavoolu.Tavaliselt vajab ülesvoolu 10D ja allavoolu 5D sirget toru pikkust, kus D on toru läbimõõt.
Pindala kiiruse tööpõhimõte
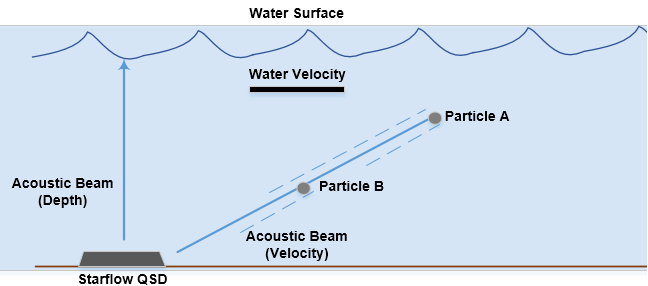
6000 DOFseeria avatud kanaliga voolumõõtur kasutab vee kiiruse tuvastamiseks pidevrežiimi Doppleri, veevoolusse edastatakse ultrahelisignaal ning veevoolus hõljuvatelt osakestelt tagastatud kajad (peegeldused) võetakse vastu ja analüüsitakse Doppleri nihke (kiiruse) eraldamiseks.Edastamine on pidev ja samaaegne tagastatud signaali vastuvõtuga.
Mõõtmistsükli ajal kiirgab Ultraflow QSD 6537 pidevat signaali ja mõõdab hajutitest naasvaid signaale kõikjal ja kõikjal piki kiirt.Need on lahendatud keskmise kiirusega, mida saab sobivates kohtades seostada kanali voolukiirusega.
Seadmes olev vastuvõtja tuvastab peegeldunud signaalid ja neid signaale analüüsitakse digitaalsete signaalitöötlusmeetodite abil.
Vee sügavuse mõõtmine - ultraheli
Sügavuse mõõtmiseks kasutab Ultraflow QSD 6537 lennuaja (ToF) vahemikku.See hõlmab ultraheli signaali purske edastamist ülespoole veepinnale ja aja mõõtmist, mis kulub pinnalt kaja vastuvõtmiseks seadme poolt.Kaugus (vee sügavus) on võrdeline läbimise ajaga ja heli kiirusega vees (korrigeeritud temperatuuri ja tihedusega).
Ultraheli maksimaalne sügavuse mõõtmine on piiratud 5 meetriga.
Vee sügavuse mõõtmine – rõhk
Kohad, kus vesi sisaldab suures koguses prahti või õhumulle, ei pruugi ultraheli sügavuse mõõtmiseks sobida.Need kohad sobivad paremini vee sügavuse määramiseks surve kasutamiseks.
Rõhupõhist sügavuse mõõtmist võib kasutada ka kohtades, kus seadet ei saa paigutada voolukanali põrandale või seda ei saa paigaldada horisontaalselt.
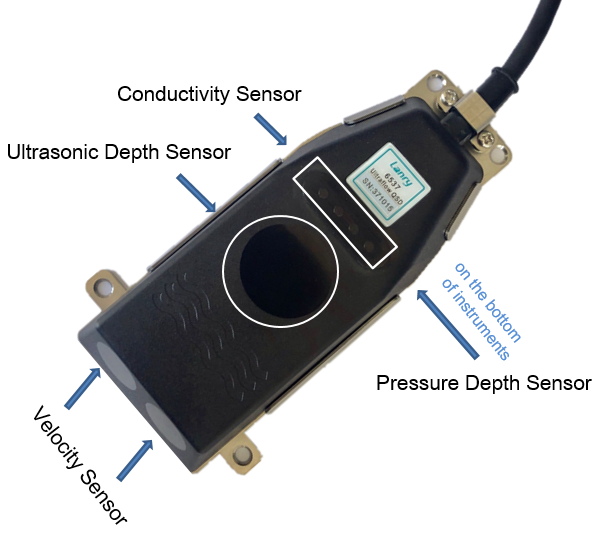
Ultraflow QSD 6537 on varustatud 2-baarise absoluutrõhuanduriga.Andur asub instrumendi alumisel küljel ja kasutab temperatuuri kompenseeritud digitaalset rõhuandurit.
Kui kasutatakse sügavusrõhuandureid, põhjustab atmosfäärirõhu kõikumine näidatud sügavuses vigu.Seda korrigeeritakse, lahutades mõõdetud sügavusrõhust atmosfäärirõhu.Selleks on vaja õhurõhuandurit.Kalkulaatorisse DOF6000 on sisse ehitatud rõhukompensatsiooni moodul, mis seejärel automaatselt kompenseerib atmosfäärirõhu kõikumised, tagades täpse sügavuse mõõtmise.See võimaldab Ultraflow QSD 6537-l teatada tegelikust veesügavusest (rõhust) õhurõhu ja veetaseme asemel.
Temperatuur
Vee temperatuuri mõõtmiseks kasutatakse tahkis temperatuuriandurit.Heli kiirust vees ja selle juhtivust mõjutab temperatuur.Seade kasutab selle kõikumise automaatseks kompenseerimiseks mõõdetud temperatuuri.
Elektrijuhtivus (EC)
Ultraflow QSD 6537 on varustatud võimega mõõta vee juhtivust.Mõõtmiseks kasutatakse lineaarset nelja elektroodi konfiguratsiooni.Läbi vee lastakse väike vool ja mõõdetakse selle voolu tekitatud pinget.Seade kasutab neid väärtusi töötlemata korrigeerimata juhtivuse arvutamiseks.